3D foot scanner using a point and shoot camera
December 17th, 2010 - ShapeStart Project Day
ShapeStart project days occur about once a quarter. It is a day where the developers and engineers at ShapeStart can work on any project they want and can work with whomever they want. Check out ShapeStart’s project day page for more information. http://www.shapestart.com/project_day.html
 I decided to build a 3D foot scanner using the canon powershot A590 and the matlab calibration toolkit (I could have used any point and shoot camera, as long as the autofocus can be disabled. There is also a way to make this work even with autofocus enabled, although it is much less straight forward and since I had only day to try and make this work. I decided to implement a non-autofocus version for now)
I decided to build a 3D foot scanner using the canon powershot A590 and the matlab calibration toolkit (I could have used any point and shoot camera, as long as the autofocus can be disabled. There is also a way to make this work even with autofocus enabled, although it is much less straight forward and since I had only day to try and make this work. I decided to implement a non-autofocus version for now)
The Idea
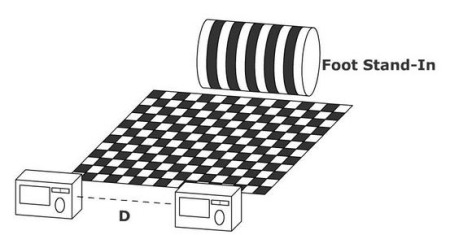
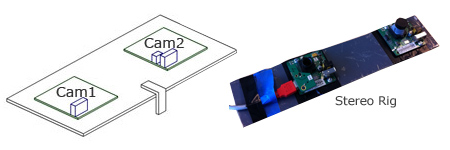
First I should explain the principal that I used for this scanner. I actually built upon the idea I created at a previous project day. The previous project day I built a foot scanner that used two fire-i board cameras mounted to a steel plate.
Note: If you’re good at it you should be able to cross your eyes and see me in 3D, if you dont know what I mean check this out:
http://www.3dphoto.net/text/viewing/technique.html.
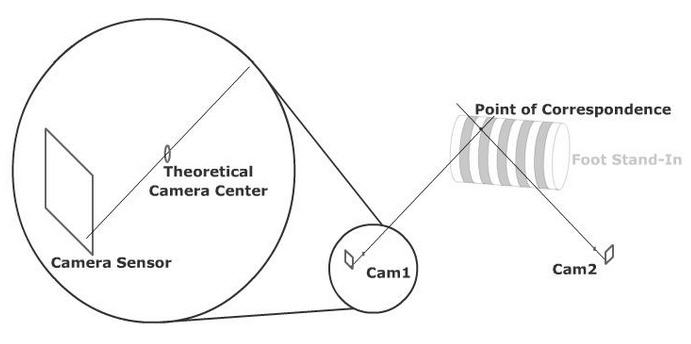
I then used canny edge detection to find the edges in the “foot” pattern. In the original setup the center bar is double the width of the other bars. This is so I could find the proper correspondence between cameras(figure out which line was which in each picture even though the bars were not coded). So once I knew which lines were the same in each picture and the images were rectified it was a simple matter of triangulation. Please take a minute and check out my article on Stereo Vision.
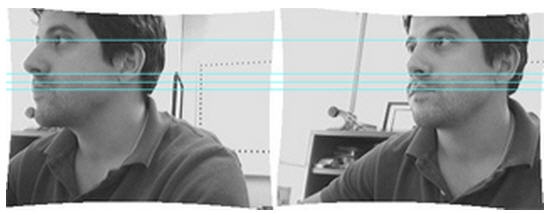
With this new, more generalised setup, the distance D was unknown. However, I was able to find the 3D positions of both cameras relative to a checker board using the Matlab calibration toolkit. Then using the two transform matrices I was able to put both cameras in the same “world coordinate system”. Once the cameras were in the same coordinate system, I had to find the corresponding pixels in each image, then triangulate the distance to the XYZ point in space where the correspondence match occurs. One way to think about this is to imagine a ray drawn from the theoretical camera center through the pixel on the image sensor, (ignoring lens distortion) this ray will also intersect the correspondence point.
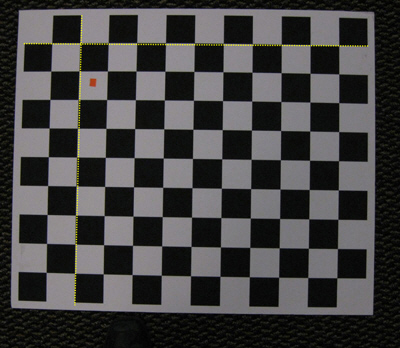
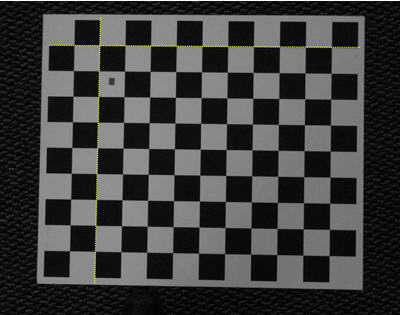
Below, you can see an example of a distorted image vs an undistorted image. This is the same picture of the checker pattern. The first is straight out of the camera, you’ll notice the checker board is actually warped(deviates from the yellow line which I drew in photoshop). Of course, in reality the checker board is not warped, so the warping you are seeing is caused by the lens of the camera. The undistort function applies the lens calibration parameters to the image to remove this lens distortion. You can see in the undistorted version of this same image below, the checker board is indeed straight and stays in contact with the yellow line I added in photoshop.
l_x=[726 729 727 725 769 770 770 769 812 813 814 812];
l_y=[188 149 108 70 189 152 110 71 188 153 111 72];
r_x=[575 574 574 576 620 618 618 618 663 660 661 663];
r_y=[151 118 80 41 154 119 79 41 155 119 81 41];
To construct the rays I just created two points, one at the camera center, translated to “world coordinates” (so both rays would be in the same coordinate space), and the second point is the pixel on the camera sensor where the correspondence occurs. Here is the code for this:
%construct the first ray
ray1_pt1=Rc_l^-1*([0;0;0]-Tc_l);
ray1_pt2=Rc_l^-1*(KK^-1*[l_x;l_y;1]-Tc_l);
Definitions for KK, Tc, Rc, etc are on this page:
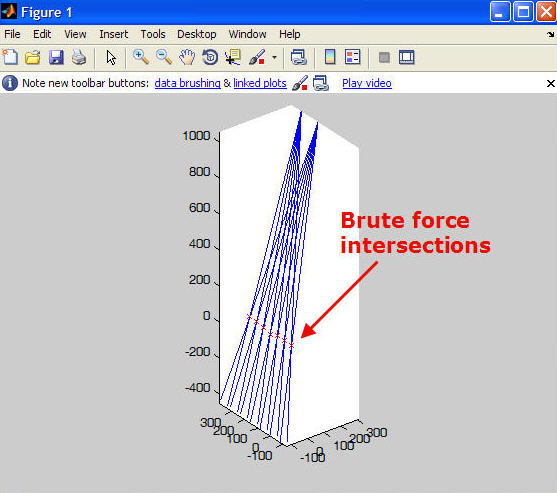
Then to find the intersection of the two rays (actually the point where they are the closest, since they will probably never perfectly intersect) I found the normal distance between the rays at every possible point along the ray, for each ray, and stored the location where it was the smallest. I call this brute force because its insanely inefficient. I didn’t have time to speed it up, I could probably do something with the cross product, or maybe figure out a way to locate an area of likely intersection and use the brute force over a small area. Anyway, the brute force method worked.
From this second view you can see it is 3D scan data, in the shape of the stand-in.
Here is my Matlab code:
foot_v2.m
stereo_match.m
 Karol Hatzilias
Karol Hatzilias
Reader Comments (3)
thanks for the information , Now I know about foursquare, your blog is good, I like it-Casio replica UK
Love is ever the Love is ever the beginning of knowledge as fire is of light.-Tag Heuer Monaco/Monza watches uk sale
I'd actually love to review these boxes on my shopping/lifestyle blog. i wonder if they'd send me a sample box to talk about? ddhuzl ddhuzl - moncler jacket store.